3D- Terrestrial laser scanning
Contents |
Prepared by Dominik Seidel
Three dimensional terrestrial laser scanning (TLS) is a ground based technique to measure the position and dimension of objects in the three dimensional space. Thereby, a laser beam is emitted from a laser light source and used to scans the surface of surrounding objects in a raster-wise manner. The instrument used to direct those laser beams into varying directions is named ‘laser scanner’. In the context of the monitoring of forest resources terrestrial, or ‘ground-based’, laser scanning should be mentioned along with airborne laser scanning (ALS). While there are strong technical similarities between these two approaches the use of airborne laser scanners, which are usually mounted on small aircrafts or helicopters, will be described in another article. Here we focus on terrestrial laser scanning and hence only some general differences between both different approaches will be pointed out.


Modern 3D- laser scanners are available from a number of manufactures, e.g. Faro, Leica, Riegel, Topcon, Trimble or Zoller & Fröhlich and others.
- Exemplary images are taken from the Websites of the companies and are in alphabetical order.












Impuls-based systems
When using the impuls-based technique the distance between the scanner and the object is determined based on the time a puls of light needed to travel the way to the object and back. This time is double the time needed to travel one way, hence the formula:
\[Distance = 0.5*t*v\,\],
with t being the total time between puls emission and puls detection measured at the instrument and v being the speed of light (~300,000 km per second), gives the distance to the object.
Phase-difference systems (or ‘continuous wave’ systems)
In the last years phase-difference laser scanning systems gained in importance as the scanning rate was increased more and more. Today up to 1 000 000 measurements per second are possible. In contrast to the impuls-based method a continuous beam is emitted from the system. The phase-difference (amplitude) of a number of combined sinus-shaped waves, so called ‘modulated waves’, between the emitted and received laser beam is measured as it depends on the distance to the object.
In both cases the laser beams, either pulsed or continuous, are directed in various orientation by a system of mirrors combined with an instrument rotation. The horizontal field of view is 360 degrees while almost 310 degrees in vertical direction are possible. State of the art laser scanners offer an accuracy of about 0.1 mm. The data created by the scanners in the form of a long list containing either cartesian (XYZ)- or polar coordinates (vertical and horizontal angle) along with an additional information on the intensity (reflectance) of the received signal. These data can be visualized in 2D-image but actually describes a 3D- cloud of detected points in space, a so called ‘point cloud’.


For forest monitoring purposes the use of terrestrial 3D-laser scanners is in an early stage. While airborne laser scanners can easily be used for large scale monitoring as they are able to cover large regions, terrestrial scanners are to be carried around on the forest floor and have limited visibility throughout the understory reducing their extensive operation. The general difference in the perspectives (airborne vs. terrestrial) causes certain advantages and disadvantages of the two approaches. While the bird-perspective is more suitable for large scale forest monitoring there is a much more detailed view to the forest when scanned from the ground with high resolution terrestrial laser scanners when compared to rather large footprint of their airborne pendants. As a consequence of the two perspectives each approach is rather ‘blind’ for certain parts of the forest. In case of terrestrial scans it might be difficult to capture the uppermost canopy due to obstruction effects, while airborne laser scanners face problems in detecting the lower parts of the trees.
Focusing on ground based laser scanning it is important that a single scan is always limited in his field of view as laser beams are reflected from the first object hit. There is no information available on what is behind this object from only one scan position. To overcome this limitation creating a real 3D replication of the environment via the combination of multiple scan perspectives on the same scene is possible. Therefore artificial objects, so called targets, are placed in the area of interest to serve as fix points, which allow merging two different scans with each other (by georeferencing). Different types of targets are available (e.g. spheres, DIN-A4 papers) and precise 3D- models of the forest can be created by puzzling the data from all perspectives together.
A variety of forest parameters can be obtained from terrestrial laser scanning, e.g. tree position, height, diameter at breast height, canopy base height, canopy dimensions, canopy cover, plant area index, competition indices as well as tree lean, sweep and taper and others more.
Standardized procedures for data processing are rare as suitable software is not yet commercially available. Hence, forest monitoring with terrestrial laser scanners is rather at the stage of intensive research than a matter of routine in forestry. There are some exceptions and promising approaches around the globe, e.g. the company ‘treemetrics’ (http://www.treemetrics.com/) offering commercial application for forest owners based on 3D-lasescanning.
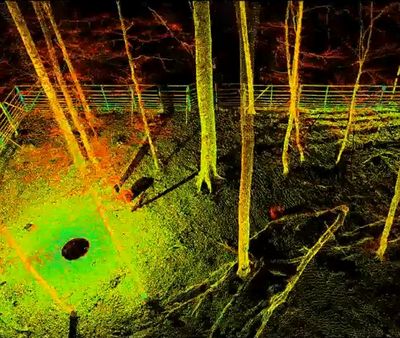
Example of a 3D point cloud
Please find an example of a 3D point cloud of a research plot in a german beech forest with this video: [1]. The different color (green to red) shows different levels of intensity of reflectance.